ロボットのタスクのためのナレッジ・エンジン「ロボブレーン」
スタンフォード大学の研究者らが、ロボットがタスクを遂行する際に参考にできる学習するデータベース「ロボブレーン」を構築中だ。『テクノロジー・レビュー』が伝えている。
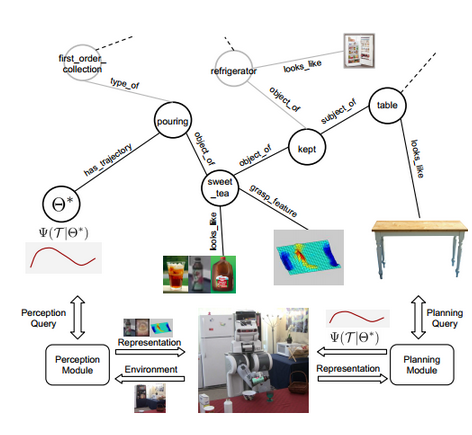
多様なノードのネットワークで構成されるロボブレーンのナレッジ・エンジン(http://www.technologyreview.com/より)
ロボットは「お茶を入れる」というタスクひとつをこなすのにも、逆さにならずカップを持ったり、こぼさずに運んだりする必要がある。われわれ人間はわからないことがあると、グーグルで検索をしたりIBMワトソンに尋ねたりできる。だが、こうしたタスクをどうこなせばいいのか、ロボットには頼るところがない。そうしたロボットのタスクのためのグーグルとも言えるものが「ロボブレーン」だ。
開発を行っているのは、スタンフォード大学コンピュータ科学学部のアストシュ・サクセナ助教授らのグループ。異なったセンサーやデザインを持つロボットにも対応するように作られ、異なったタイプの問いにも回答を出し、またワードネット、イメージネット、フリーベースなどさまざまなところからナレッジを引き出すことができるようにしているという。
さらにすでにあるサービスであるテル・ミー・デイブ(ロボットが自然言語を理解するようにする)やプランイット(クラウドソースの情報を利用してロボットがパスプランをする)とも連携するようにしている。いずれもサクセナ助教授の古巣であるコーネル大学での研究が元になっているもののようだ。
ロボブレーンは、ナレッジを有向グラフで表現されるネットワーク理論に基づいて捉えている。グラフ状のノードはイメージ、テキスト、ビデオ、触覚データ、学習されたコンセプト(容器など)など、多様なものに対応する。
新しく学習したものは、ノードにつながるサブセットとして加えられていき、ロボットのタスクの可能性を広げる。たとえば、「座っている人間はマグを手に持てる」という概念は、「マグ」「カップ」「座っている人間」といったノードを「利用できる」という概念にリンクさせるという。
サクセナ教授は、ロボット研究者たちがどんどん貢献することによって、ロボットの性能が高められるだけでなく、ロボット・コミュニティー全体にとって有益になると語っている。