<イベント・レポート>『アマゾン・ピッキング・チャレンジ(APC)』<その1>1位はベルリン工科大学チームチーム
去る5月26〜27日の両日、シアトルでのロボット学会ICRA開催と並行して、アマゾン・ピッキング・チャレンジ(APC)が開かれた。世界から集まった30近いチームが、ロボットハンドのデクステリティー(器用さ)を競うというもの。
2日間の連続して各ロボットがチャレンジした結果、1位はベルリン工科大学のチームRBO(148点)、2位はマサチューセッツ工科大学のチームMIT(88点)、そして3位は米ミシガン州のオークランド大学とデータスピード社混成のチーム・グリズリー(35点)となった。賞金は1位2万ドル、2位5000ドル、3位1000ドル。
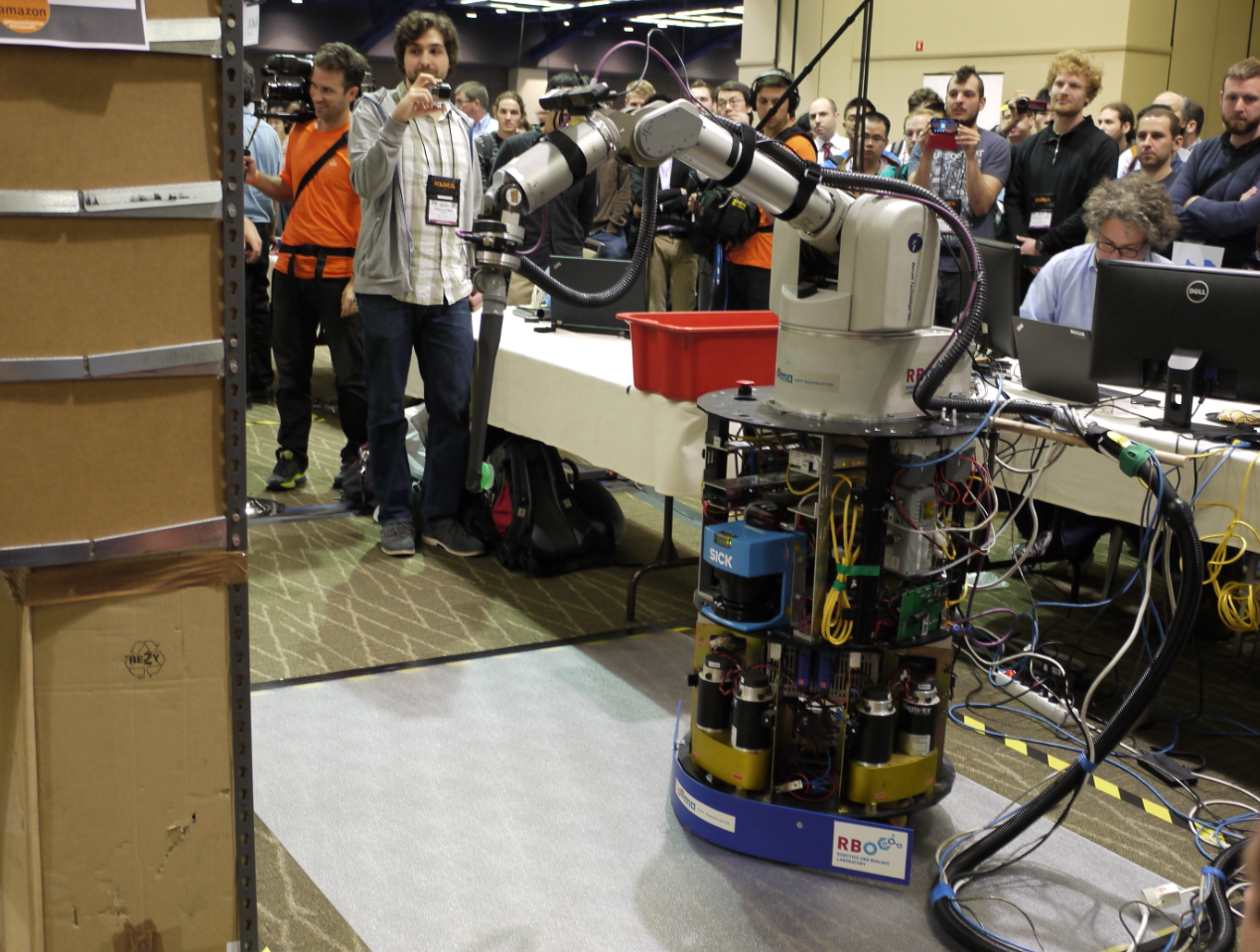
1位のRBOチームは、何といっても可動ベースとアームのフレキシブルな動き、サクション(吸い取り)の確実さが目立った。可動ベースの上にバレット・テクノロジー社製アームにが用いられ、アームの先にサクションのためのチューブとカップが取り付けられている。
同チームリーダーのロベルト・マルティン=マルティン氏によると、当初アームだけを利用しようとしていたが、ワークスペースが小さ過ぎてうまくいかないことがわかり、可動ベースを組み合わせた。両者は、特にサクションの際に動きを調整し合う。
また、サクションの際のポジション制御は行わず、トルク制御で適切な方向から商品を吸い上げるという単純な方法を採ったという。正確過ぎると返って行き詰まってしまうだろうという判断だった。認識技術についても現在チームに質問中なので、回答が来たら改めてお伝えしたい。
2位のチームMITは、サクションとグラスプ両方に対応する回転ハンドがユニークだった。同チームはマサチューセッツ工科大学(MIT)のエンジニアリング学部でグラスピングを研究してきた。いろいろなものをつかめるハンドやグリッパーをいくつも試してきた経験のあるチームだ。
今回も、ドイツのヴァイス・ロボティクス社のマニュピュレータ・システムの先に独自のハンドを製作。商品を持ち上げたり、棚の中で隣接する商品から離すために、下側のフィンガーの先に「リップ」と呼ぶ薄い板を付けた。この弾力性が功を奏した。
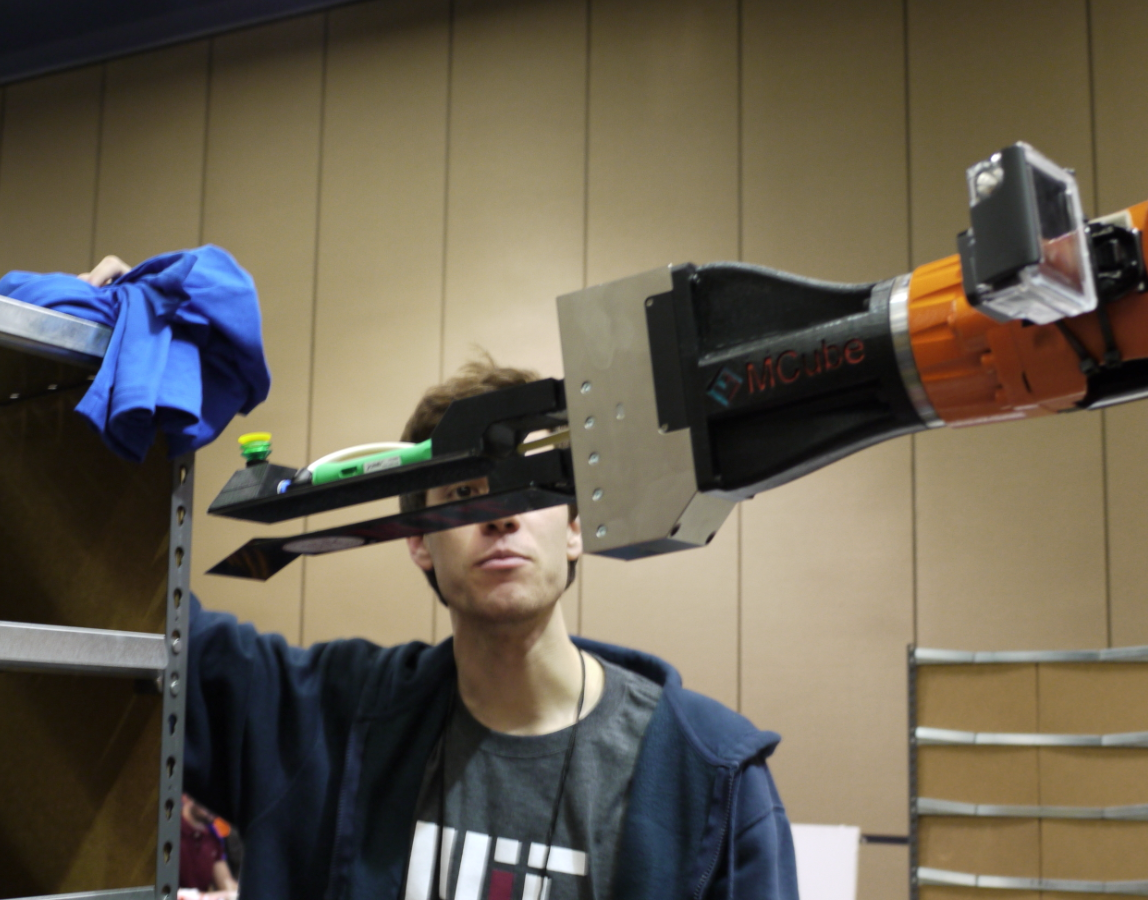
アームには産業用のABB社製が用いられていた。「産業用ロボットの方が動きが正確」とチーム・メンバーが説明していた。認識は商品のジオメトリーに基づいて行い、サクションを優先して利用。そうした決定木やコーディングに工夫を凝らしたという。