『EmTech 2014』レポート<その1>アトラス、山道を行く
下の写真は、ヒューマノイド・ロボットのアトラスが山道を歩いている様子だ。ビデオでお伝えできないのが残念だが、ザクザクと力強く地面を踏みしめている。

こんなロボットに山奥でばったり出会ったら……
これは、9月末にボストンで開かれた『EmTech 2014』会議で、ボストン・ダイナミクス社CEO のマーク・レイバート氏が公開したもの。アトラスはDARPAのロボティクス・チャレンジ(DRC)にも参加するロボットとして知られるが、来夏の決戦に向けて訓練しているものと見られる。決戦ではデコボコの地面を速く、そして電源へのテザリングなしに歩かなければならないからだ。
このビデオのアトラスは、まだテザリングがついていたが、いずれ取りはずすとのこと。難なくはずせる、という感じのニュアンスだった。
もちろんボストン・ダイナミクス社はアトラスを開発、供給しているものの、決戦に独自の名前で参加するわけではない。それでもこうやって性能を向上させているのだろう。
同氏の講演では、ボストン・ダイナミクス社歴代のロボットの紹介とそのビデオが見せられた。ロボット・ファンの読者ならば、すでに見ておられるものがほとんどだろう。
ただ、ひとつ興味深かったのは下のスライドである。
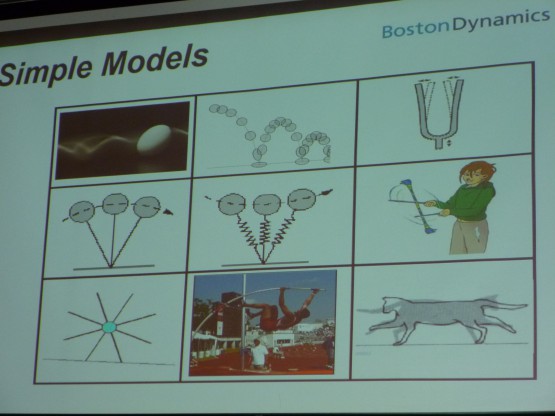
これは、ロボットのあらゆる動きは単純な物理的モデルとして捉えるという内容。たとえば、転がる卵はエネルギーが上下に移動する点で、ロボットの足のロコモーションに通じる。また、ボールがバウンスするのは、ロボットが走る際のエネルギーの動きに通じるという。要は、身体の動きではなく、キネティックなエネルギーの動きに目を向けるというわけだ。
また、下のスライドは、いつもこのように考えるという図。
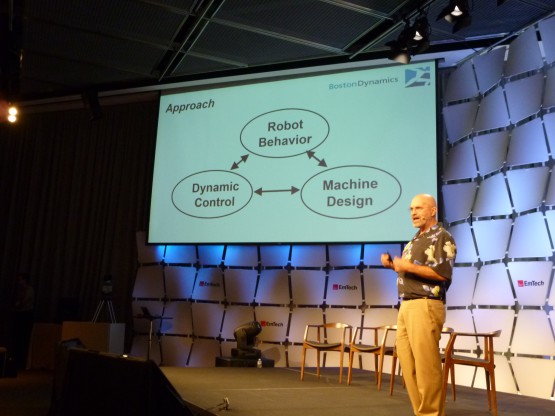
ボストン・ダイナミクス社のアプローチを説明するレイバート氏
ロボットの動きとダイナミックな制御方法、マシーンのデザインは、どれも均衡を保った状態で開発を進めていくということだ。
『emTech 2014』イベント・レポート、<その2>もどうぞ。