2014年たまっていたイベント・レポートまとめ<その7>『ISR2014会議』
今年のイベント・レポートをまとめてお伝えする第7回は、6月にロボット展示会『オートマティカ(Automatica)』と並行して開催されたロボット会議「ISR2014」について。今回で45回目という歴史ある集まりで、講演とポスター・セッションから構成されている。ドイツの最大規模のロボット会議『ロボティーク(Robotik)』との合同会議として開催された。
講演から、気になったスライドを引用しながら一部ポイントをご紹介したい。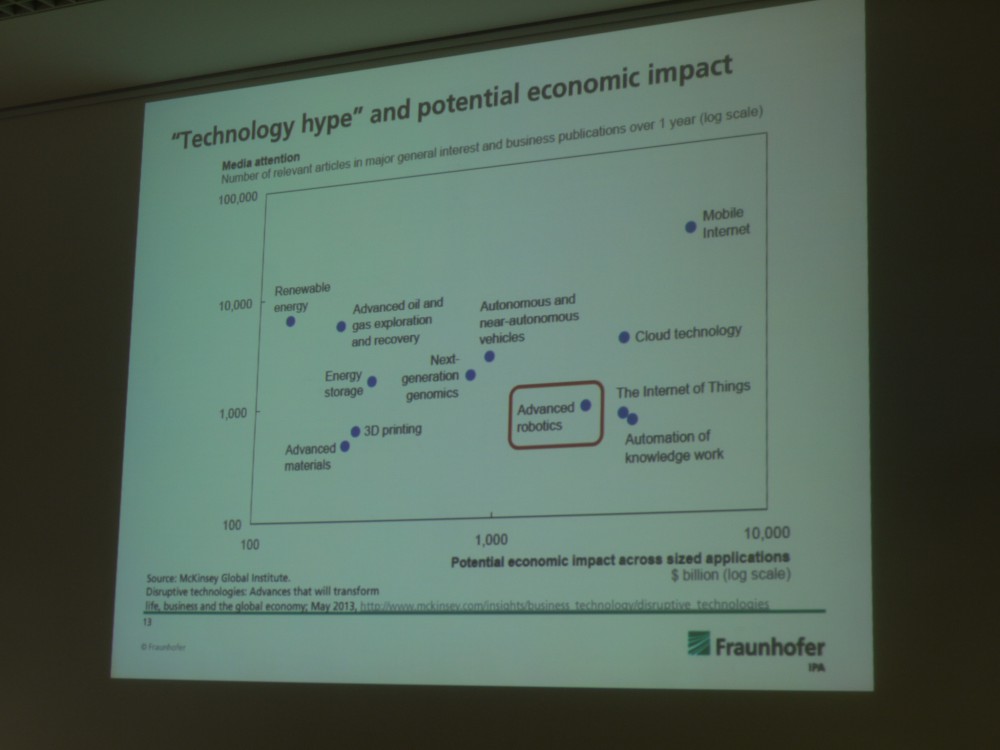
上のスライドは、ドイツの研究所、フラウンホファーによる現在のテクノロジーのハイプと経済インパクトを分布図にしたもの。これによると、先端ロボット技術は、経済的インパクトの大きさ(横軸)に比べてまだメディアでの注目度(縦軸)が低いという位置づけ。
ただ、アメリカでも日本でも、おそらくヨーロッパでも、この1年で注目度は急上昇しているので、現在ではすっかり変わっているかもしれない。いずれにしても、ロボット技術は再生エネルギー、次世代遺伝子学、ナレッジワークの自動化など、パラダイムシフトを起こす他の技術と共に列記されるわけだ。
下のスライドは、研究機関であるDFKI社ロボティクス・イノベーション・センターのフランク・キルシュナー氏の講演から。近未来に必要とされるロボットを生み出すのは、これまでと比べものにならないほど難しくなるという図だ。
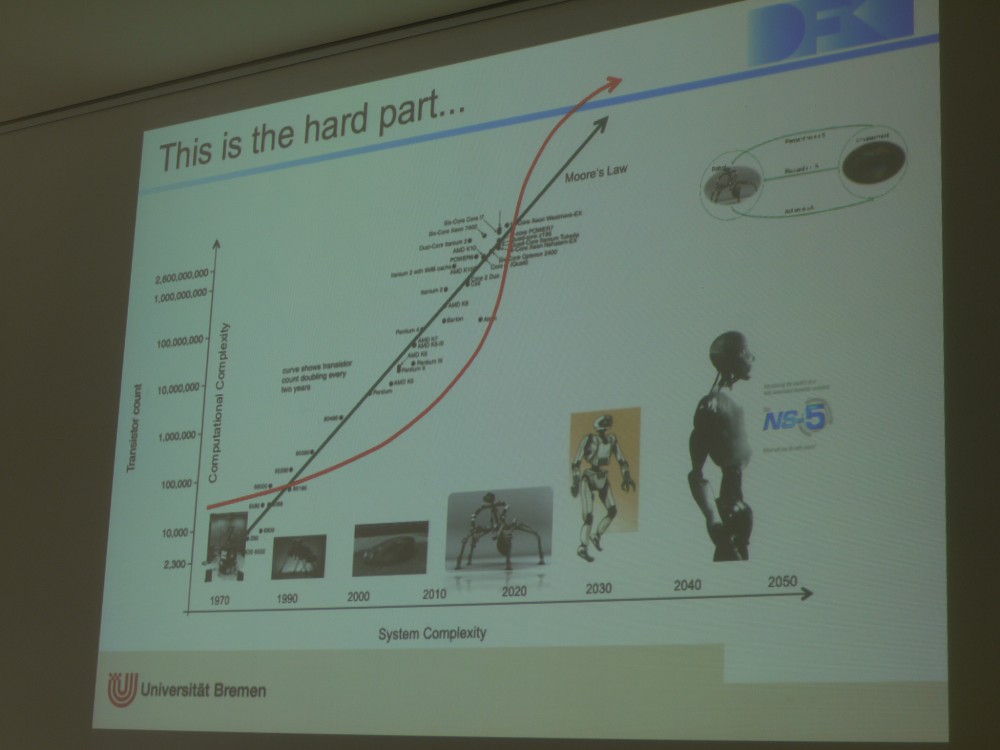
同氏によると、これまでムーアの法則に従ってチップが進化するのに頼ってきたため、全体のコンピュータ・システムをコンパクトに作る努力を怠るようになった。
しかし、今後構造的にもシステム的にもロボットは複雑性を増していく。知能も向上させ、すべてが同時に機能するようにしなければならない。そうしないと、人間に役立つコンパニオン・ロボットはできないという。
さて、下のスライドは、クカ・ラボラトリー社が行っているpHRI(物理的なヒューマン・ロボット・インタラクション)を考察する分類の一部を示したもの。
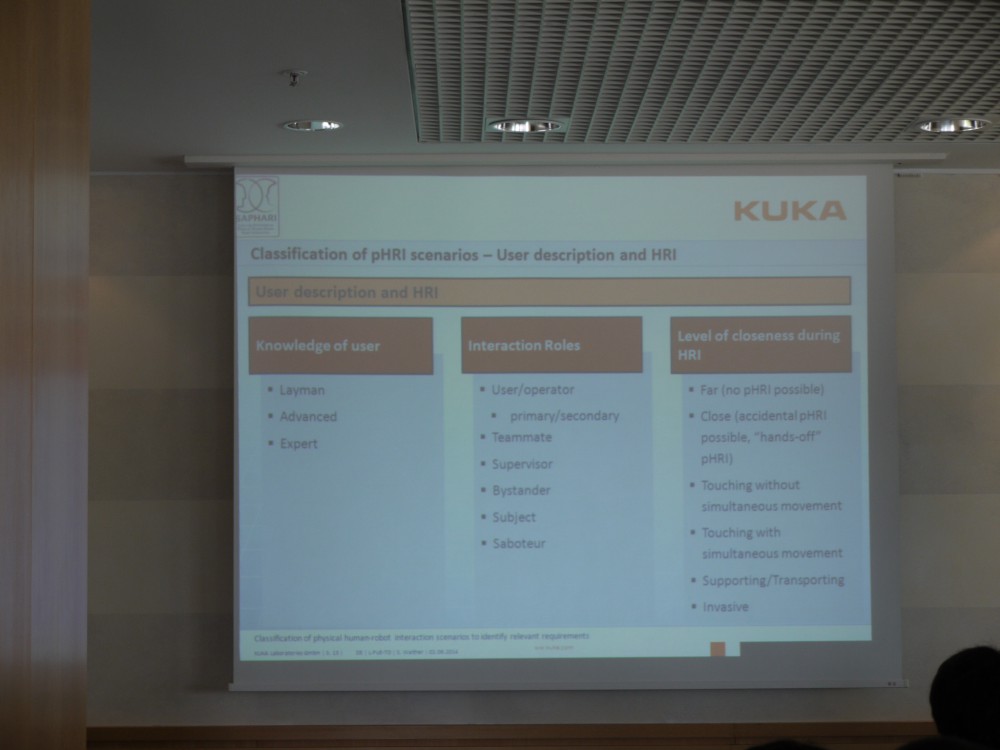
ロボットと人が一緒に働くようになる現場での安全基準が、現状に合ったかたちで 設定されるよう働きかけている中で、こうした考察を行っているという。
その過程では、まずそこで行われるべきタスクを記述し(環境、タイプ、難易度、危険度など)、次にロボットの記述を行い(モビリティーのレベル、形状、自律レベルと人間の介入など)、その後にここにあるようなユーザー記述とpHRIを分類する。
ここでは、ユーザーのロボットに対する知識、ロボットとのやりとりの種類(ユーザー、チームメイト、サポーター、傍観者、対象、妨害者など)、距離レベルを書き出している。
こうしたさまざまな分類事項が、pHRIの安全基準を決める前提条件を作るわけだ。同社では、この考察をEUの標準化委員会に提出しているという。
ロボットと人間が共同作業をする具体的な風景が見えるような分類だ。
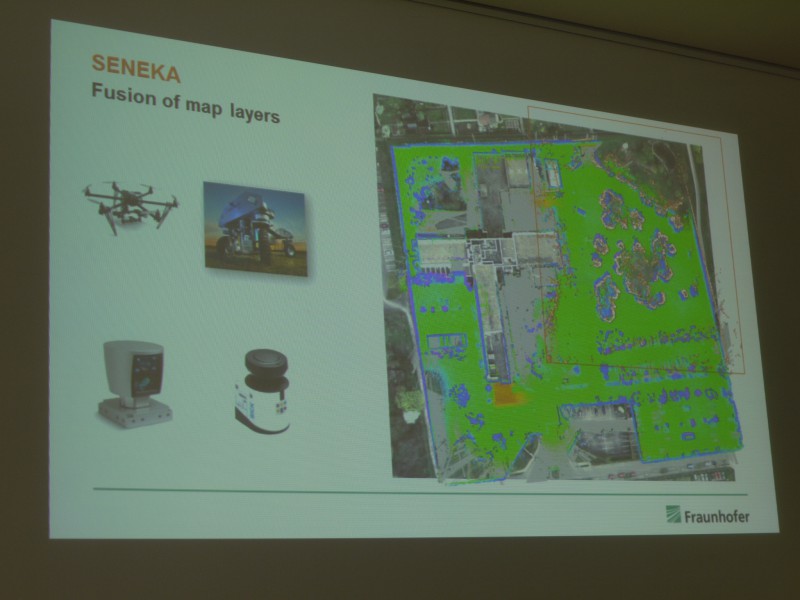
最後に、上出したフラウエンホーファー研究所の『ゼネカ(SENEKA)』は、被災地の救助救援のための所内プロジェクトとして行われているもの。地上のモバイル・ロボットとドローンを用いたセンサー・ネットワークによって、生存者や危険物を短時間内に特定することを目的としている。
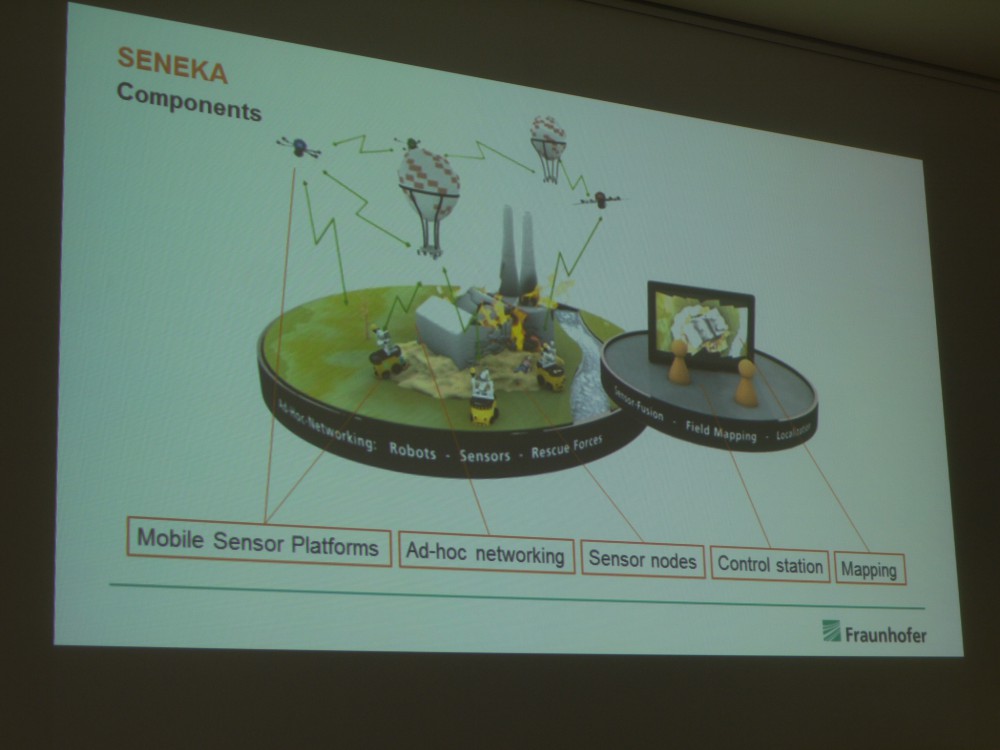
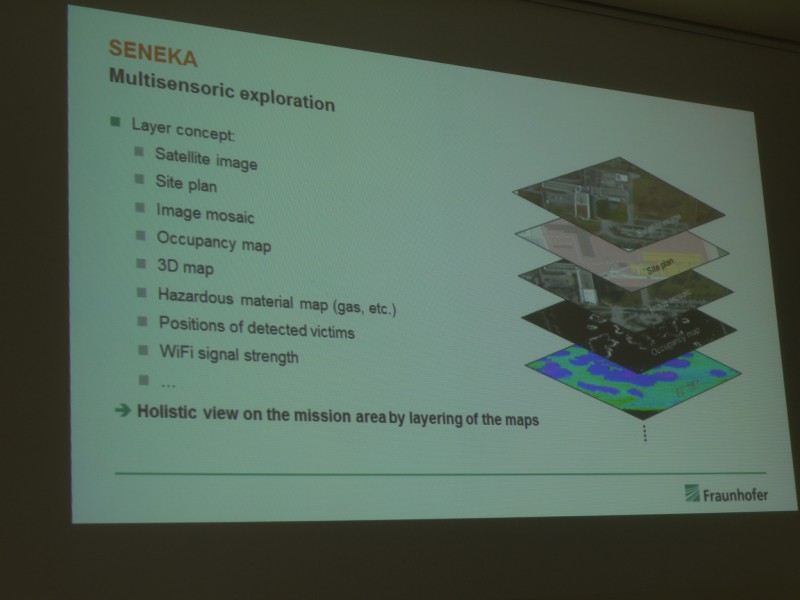
同研究所ではアドホックな無線ネットワークのプラットフォームも構築中で、あらゆるタイプのセンサーを動員する。生存者の場合は、温度や音、持っているデバイスやロボットを感知することなどが発見につながる。2Dや3Dカメラ、LIDAR、赤外線、GPS、危険物センサーなど多様なセンサーが取得するデータは、レイヤー状にして表示する方法も開発中だ。
このシステムは、すでに被災地でのテストも行っている。まだ「うまくいく可能性がある」という段階だというが、心強い開発だ。